 Image credits: Kreuzweise
Image credits: Kreuzweise
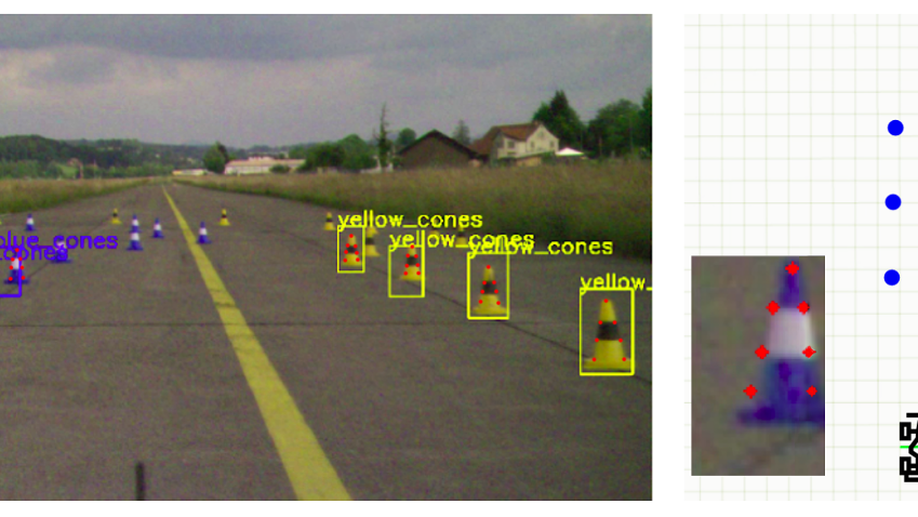
Keypoint-Network for Monocular Pose Estimation
The work was done in collaboration with CVL@ETH-Zurich with Dengxin Dai and Prof. Luc van Gool. The official project page can be found here.
AMZ-Driverless
I was officially involved in the 2018-2019 season as the Head of Perception with pilatus driverless. The year before, I was worked on the computer vision pipeline, more specifically developed the monocular pipeline and the keypoint network.
In 2018 we were declared Champions at Formula Student Italy and Formula Student Germany and in 2019 at Formula Student East and Formula Student Germany. Here’s a video of “gotthard driverless” cruising autonomously at the Hockenheimring from FSG'18.
Involvement
pilatus driverless: Head of Perception [2018-2019]
gotthard driverless: Computer Vision [2017-2018]
Driverless cars in action
pilatus driverless @FS Germany 2019
gotthard driverless @FS Germany 2018
Acknowledgement
We would like to thank AMZ Racing, especially the Driverless team without whom this project would not have been possible. The work is also supported by Toyota Motor Europe via the project TRACE-Zurich.
Publications
Real-time 3D Traffic Cone Detection for Autonomous Driving
IEEE Intelligent Vehicles (IV), Paris 2019